



Rupert Holmes looks at how to set up your boat autopilot so it will steer better than you can


Rupert Holmes has sailed over 80,000 miles, including from New Zealand to Uruguay via Cape Horn and racing around Britain
Installing a decent boat autopilot makes a huge contribution to comfort when cruising and passage making.
Yet for many of us the idea of being able to rely heavily on a boat autopilot in testing conditions remains a distant utopia.
However, the basic technology that enables pilots to steer accurately in challenging situations has been reasonably affordable for more than 15 years.
Equally, if your boat has an older and lower-spec system there’s often much that can be done to improve its performance.
The short-handed offshore racing community has been at the forefront of pushing development and understanding in this area for many years.
We drive our boats extremely hard, often sailing 3-5,000 miles each season, and therefore discover issues that may not otherwise come to light.

As well as getting the boat autopilot settings right, don’t forget to balance your sail plan and trim as conditions change to aid course-holding. Credit: Rupert Holmes
There are plenty of examples of very successful skippers who use their pilots almost all the time, irrespective of wind strength, wind angle, or sea state.
Among them is Pierrick Penven, whose well-travelled Jeanneau Sun Fast 3200 Zephyrin has an enviable track record.
This includes victory in the solo division of the 4,000-mile Transquadra race from St Nazaire to Martinique, which he followed with three months of family cruising in the Caribbean.
He also won both legs of the 2019 Azores and Back race, well ahead of even the best double-handed boats on corrected time.
After the AZAB Penven told me he had used the boat autopilot, ‘99.9% of the time.’
This included blasting downwind at speeds above 15 knots in 40 knot gusts in the newly formed Storm Miguel that wreaked havoc on the Atlantic coast of France a couple of days later.
In most cases, adjusting settings for your boat autopilot requires scrolling through menus, so laminate the relevant pages of the manual as an aide memoire
Yet Penven said he only took the helm during the race ‘to have a break and a bit of fun.’ Yet his French NKE pilot, while good by the standards of many, is by no means the latest generation system.
So what’s the secret to being able to rely so heavily on a boat autopilot, even in extreme conditions?
Whatever the system, the starting point is the same: proper set up, followed by time spent learning optimal settings for different conditions.
It’s easy to think there is no need for cruisers to bother with this kind of tweaking, but that’s far from the case.
A boat autopilot that steers a more accurate course will result in a more comfortable motion in testing weather and will consume less electricity.
It’s also hugely reassuring to know your boat autopilot will cope with any conditions, whereas if someone needs to helm all the time in bad weather it quickly becomes tiring, especially with family or small crews.
Continues below…

Autopilot Buyers Guide for sailing yachts
There’s a bewildering array of options available for pilot systems, Rupert Holmes explains how to choose a suitable autopilot system…

Tech that will change your cruising
It's a bold claim that tech can change how we sail, but there are areas where marine equipment really is…

Offshore sailing skills: All you need to know
Will Bruton finds out what coastal cruisers should consider before taking their small yacht on an offshore adventure

Windvane steering: why it makes sense for coastal cruising
No electricity needed and built for gale-force conditions; windvane self-steering makes sense for coastal cruisers as much as offshore voyagers.
Before he took over as CEO of the Navico marine electronics group, Volvo Ocean Race winner Knut Frostad completed an 18-month Atlantic cruise with his young family on their Outremer 5X.
While he relied heavily on his boat autopilot, the 60 or so cruisers he interviewed often told him that their pilots struggled in strong winds.
They also revealed that many owners never change their pilots from their factory settings, so the boat autopilot can’t be relied on in critical manoeuvres like reefing or in boisterous conditions.
Even the best pilots in the world can zig-zag if not set up properly, according to Frostad.
Equally, Zest, my partner’s 36ft Rob Humphreys one-off, has been steered by a mid-2000s era Simrad/B&G system for much of the 26,000 miles the boat has covered since 2013.
Although it’s a relatively simple and low-cost system by today’s standards, during that time it has coped with the full gamut of conditions, including beating under storm jib and trysail against a full gale in the Western Approaches and many thousands of miles surfing Atlantic waves at speeds well into double figures.
There’s no single magic bullet to getting the best from a boat autopilot, though several guiding principles apply almost universally.

A range of brands offer boat autopilot systems including the ruggedly built Pelagic autopilot range
For a start, proper initial set up, including accurate calibration, are essential. A well-balanced sail plan and good sail trim remain as important as in the days that windvane systems were our only option for automated steering.
If the boat is set up so that a skilled human has issues keeping the boat on course, then a pilot will also struggle.
Understanding the pros and cons of different boat autopilot systems is key to being able to tweak settings and to get the best from each generation of system.
The first pilots for smaller sailing boats in the 1970s and early 1980s were impressive devices at the time.
However, they had the most rudimentary of sensors and minimal computing power, though many are still in use.
A big step forward came with the availability of reasonably affordable rate-sensing or gyro compasses. Unlike a basic fluxgate compass these can measure the rate at which a boat is turning.
The pilot computer can use this data to determine how much rudder angle is needed to correct the course – and how quickly it needs to be applied.
It’s like the difference between a novice helm attempting to steer by focussing solely on the compass and an experienced sailor who looks ahead most of the time and therefore is constantly in tune with the boat’s rate of turn.
Another important feature is the rudder angle sensor.
If the pilot knows both the rate of turn and the angle of the helm it can make a better estimate of how long to apply a course correction before moving the rudder back towards the centre.
Lack of a rudder angle sensor is a key reason why most standard tiller pilots, and externally mounted wheel pilots, can’t perform as well as a permanently mounted below-deck system.
Another leap came in the early 2010s with nine-axis sensors. These have a compass with heel, pitch and yaw sensors.
If heel angle increases, or the stern starts to lift when sailing downwind, the boat autopilot knows the boat will tend to luff up.
It therefore responds before the compass course has changed.
Elements of the boat autopilot system

- Computer
- Compass or 9-axis sensor
- Optional: rudder angle sensor
- Optional: interface with other electronics, including wind data
In some cases, notably all-in-one tiller pilots, the motor, computer and compass are all contained within the single unit.
Even so, most of these units, especially more recent models, can also be networked with other elements of the boat’s electronics.
The course computer calculates exactly when, and how quickly, the rudder needs to move, as well as how much helm angle is needed.
It also figures out when to return the rudder towards a neutral position to avoid over correcting.
Gyro compasses are better than fluxgate compasses, but nine-axis sensors now measure more parameters, including heel angle, pitch and yaw that can help the course computer to calculate optimal helm movements.
In addition, if the system knows what angle the rudder is currently at, the computer can more accurately calculate how large a course correction is needed – and can apply exactly the right amount of rudder angle.
A properly calibrated rudder angle sensor is therefore an important element and markedly improves course keeping.
Properly calibrated wind data allows accurate steering when sailing close-hauled, close reaching with a Code 0 or asymmetric spinnaker, and when sailing downwind.
It’s worth noting that some autopilots and control units include proprietary software, so they need to be set up with the same brand of control unit and pilot computer, even if they are all NMEA 2000 capable.
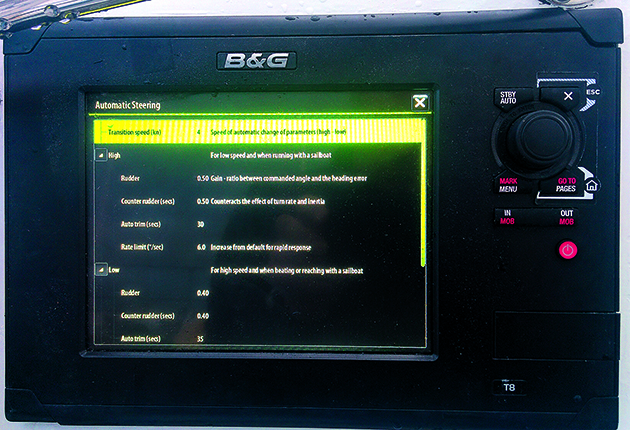
Improving boat autopilot course-keeping
Most pilots in use today have user-adjustable parameters to improve course-keeping in different conditions.
These effectively tweak the algorithm that decides how big a rudder movement is needed to get the boat back on course and how long that helm angle can be applied without risk of over-correcting.
Sailing upwind in light airs clearly requires a different helming style to broad reaching in a stiff breeze.
This is why we need to understand how to adjust parameters like Gain, Counter Rudder and Auto Trim.
1. Understanding Gain

To really trust your boat autopilot, you need to know it will react appropriately for the conditions. Credit: Rupert Holmes
Gain controls the amount of rudder angle used and how quickly it’s applied. If the gain is set too low the boat will take too long to return to the desired course.
On the other hand, if gain is too high, the boat will overshoot and yaw each side of the set course.
This was a common problem with early pilots where gain was often the only parameter that could be adjusted.
2. Counter Gain

In boisterous conditions, you’ll need the boat autopilot to centre the rudder quickly after a correction. Credit: Graham Snook
The Counter Rudder (sometimes called Counter Gain) setting adjusts how long a helm correction will to be applied for.
In a quartering sea, for instance, a fast initial response is required to prevent the boat screwing up into the wind.
But then the helm needs to be centred quickly so the boat doesn’t bear away too far.
Increasing Counter Rudder does this – it doesn’t impede the initial quick movement of the rudder when gain is set relatively high, but the helm will centre more rapidly
3. Auto Trim

Modern pilots can learn how best to keep a boat on course. You can tell it how quickly to learn and adapt. Credit: Rupert Holmes
Auto Trim (or Auto Learn) determines the speed at which the system learns how much weather helm needs to be applied.
If the boat autopilot appears to take a long time to apply an appropriate amount of weather helm when conditions change, then a lower figure is needed.
However, if it initially oscillates between too much and too little weather helm, Auto Trim needs to be increased.
As a starting point with B&G or older Simrad systems try the vessel’s LOA in feet.
Gain is likely to account for 70-80 per cent of all adjustments needed, though Counter Rudder may need tweaking in tandem with big changes to gain.
Once you find the right Auto Trim setting for your boat it’s not likely to need a lot of adjustment.
4. Compass or wind mode?

Choosing wind mode may let your boat steer more like a human helm would. Credit: Rupert Holmes
For boats with wind data interfaced to their pilots the rules for whether to use compass or wind mode depend on the point of sail.
When upwind, or close reaching with a Code 0 or asymmetric spinnaker, steering to the apparent wind angle is best.
Even then don’t expect the boat to sail as close as when you’re helming, bear away a few degrees and set the sails with a little more twist to give a wider groove.
A compass course will invariably be most efficient when reaching. Once the wind is well aft, however, changing to true wind mode will give best results.

Sailing under spinnaker solo becomes enjoyable if you trust your boat autopilot. Credit: Rupert Holmes
None of the concepts required to tune a boat autopilot are intrinsically difficult when considered individually.
However, collectively they can amount to a lot to think about at times when attention may need to be focussed on other matters.
NKE has a neat solution – users enter a matrix of pre-set parameters that can subsequently be dialled in at the press of a button, much like the tuning of an old-school car radio.
The matrix covers nine different conditions: beating, reaching and running in light, medium and heavy winds. Therefore it’s easy to select the correct mode for your boat.
Successful short-handed racers will then fine-tune a little more, but for cruising purposes this is rarely necessary.
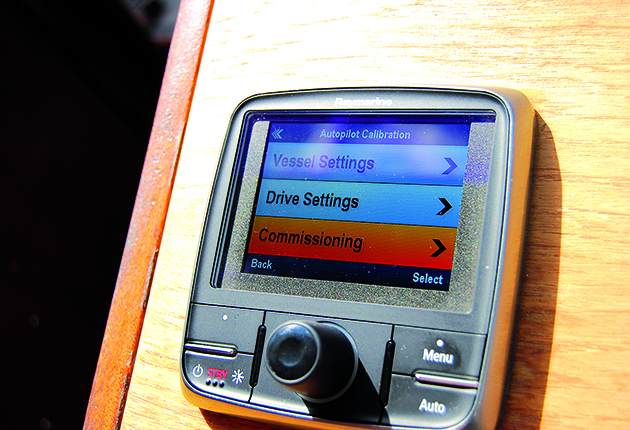
Alternatively Raymarine’s Evolution or Garmin’s Reactor pilots may appeal.
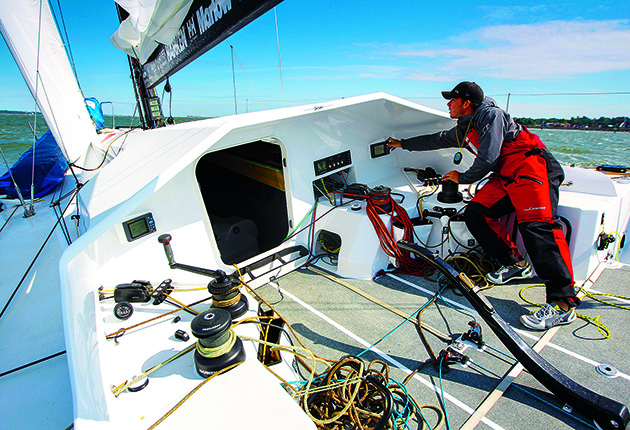
Many solo racers use the NKE system for the level of control it gives them. Credit: Paul Wyeth
These are designed to be used without the need for settings to be changed thanks to algorithms that quickly learn different conditions. However, both still require proper initial set up and calibration.
The Raymarine units have no user-adjustable parameters outside of three different modes: Performance, Cruising and Leisure.
These are analogous to the sport, manual and eco modes of many automatic cars that allow you to adapt the system’s response, without having to change gear yourself.
Even on a cruising yacht you may still want to switch to Performance mode when sailing downwind in strong breezes – this will increase the pilot response in a similar way to stepping up the Gain and Counter Rudder values of other systems.
The premise of Garmin’s Reactor series is also that users won’t need to change settings as a matter of course.
However, the values for Gain, Counter Gain and Auto Learn are available in the Dealer Commissioning pages of the menu system and can therefore be tweaked if necessary.

A pilot remote can be useful when going forward. Credit: Paul Wyeth
Until a few years ago all systems required the user to change settings to get the best from the unit in different conditions, although some have a degree of automatic switching between different modes.
Zest’s Simrad N42 pilot computer, a model that was widely sold for more than a decade until around 2014, allows different sets of parameters to be saved for low boat speeds and running (when bigger helm movements are needed) and when beating or reaching at higher speeds (when smaller helm movements are necessary).
Even so, further fine-tuning is needed to cope efficiently with different wind strengths and sea states. It’s therefore worth noting settings that result in good course-keeping in different conditions.
I tend to keep in mind NKE’s simple grid of different points of sail and wind strengths.
Gradually filling this in over time and refining the numbers will provide a good set of data to ensure even older pilots can be made to steer the best possible course possible in different conditions.
I like to have it as a laminated card taped next to the pilot controllers, with space for annotations, as you identify settings that work best in different circumstances.
Boat autopilot set up & calibration
These elements are too often skimped, even with professionally installed systems, yet are critical for decent performance.
If the digital compass or 9-axis sensor is not properly calibrated or is installed too close to objects such as other electronics or ferrous materials it will not be accurate.
Fortunately compass calibration is simple, given flat water and space to turn the boat slowly through a turn and a quarter over a period of two or three minutes.
B & G boat autopilot systems have a clear and accessible calibration menu. Credit: Rupert Holmes
B&G systems generally allow easy access for this in the calibration menu, while for other brands it may be found in the Dealer Commissioning menu.
In all cases the manual for the pilot will guide you.
Equally, it’s easy to see that if the rudder sensor is not properly calibrated the system won’t accurately know when the rudder is central, its maximum angle in each direction, or the amount of play in the steering.
This can be easily set up without leaving the dock, again usually using the initial calibration menus and by measuring port and starboard helm angles when instructed.
Masthead wind sensors are rarely perfectly aligned, so instrument systems allow an offset figure to be entered. The best way to measure this is to motor head to wind in light airs.

NKE pilots go a step further and allow a matrix of pre-set settings to be recorded
Accurate boat speed is also needed to calculate true wind strengths and angles. In addition, most pilots have an automated calibration process that helps the system to learn the boat’s characteristics and needs to be carried out while under way.
How much effort should go into this set up?
An hour or so will get reasonable results that can make a big difference to course keeping. However, it would be a mistake to treat these results as gospel.

The Raymarine ST2000+ is a classic. It can be set to compass and wind trim mode, but calibration is limited to gain and damping
At the high end of the racing scene perfect calibration is seen as an almost unachievable holy grail, so professional navigators put a considerable amount of effort into improving their figures.
On the plus side, interfacing a boat autopilot with other marine electronics is no more difficult than for any other item.
The complexity of this task depends partly on how recent the various systems are and possibly on whether there’s a mix of products from different manufacturers, especially if they are from different eras.

External wheel pilots will benefit from the addition of a rudder angle sensor
Integration tends to be easiest on recent plug-and-play NMEA2000-based systems, but may be more complex for electronics using older protocols.
When having a boat autopilot installed professionally it’s always worth ascertaining exactly what the quote includes. Is it simply bolting the units to the boat and connecting the wiring?
Will it be networked to the existing electronics? Does the quote include dockside checks and rudder sensor calibration?
What about set up that can only be done when under way, such as compass calibration and automated initial response settings?
Tiller Pilots
Tiller steered boats without a below deck quadrant that a pilot motor and rudder angle sensor can be connected to are at a disadvantage when it comes to finding a decent boat autopilot.
In addition, many all-in-one tiller pilot models have seen little development in the last couple of decades and have a number of inherent disadvantages.
Most are connected a long distance from the rudder stock, which reduces loads on their motor, but precludes a rapid response, and there’s no provision for a rudder angle sensor.
There’s also no clutch, so the unit has to be physically connected to the tiller and disconnected every time you switch from stand-by to auto mode and vice-versa.

Tiller pilots can suffer from water ingress. Credit: Graham Snook/Yachting Monthly
In addition, the movement of the steering arm in and out of the housing changes the air pressure, making these units difficult to waterproof.
It therefore makes sense to invest in the type of tiller pilot whose motor is separate to the rest of the electronics.
That way, when water finds its way inside, it’s only likely to impact electrical connections that can often be successfully dried out, not complex electronics that may not survive.
Zest is pushed hard when racing and the system also has to survive the rigours of ocean sailing, so we searched widely for a better option.
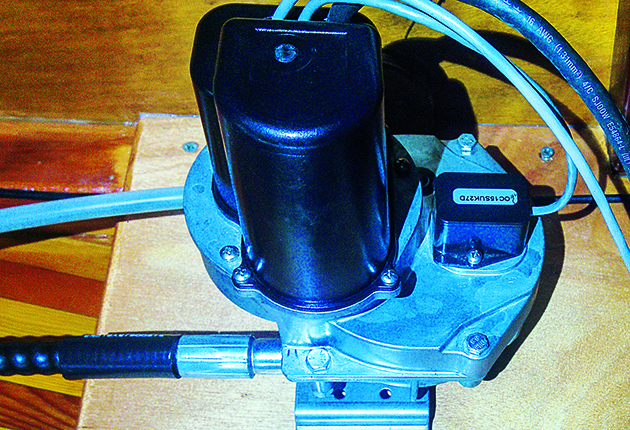
A B&G SD10 drive keeps the motor protected below decks. Credit: Rupert Holmes
The solution was a B&G SD10 drive, which has a motor below deck connected to the tiller via a Bowden cable.
It includes a rudder angle sensor and clutch, and is powerful enough to operate on a much shorter lever than most tiller pilots – 6.5 inches from the rudder stock, instead of 18 inches.
On Raymarine ST1000/2000+ tiller pilots only Rudder Gain and Rudder Damping settings can be adjusted by the user.
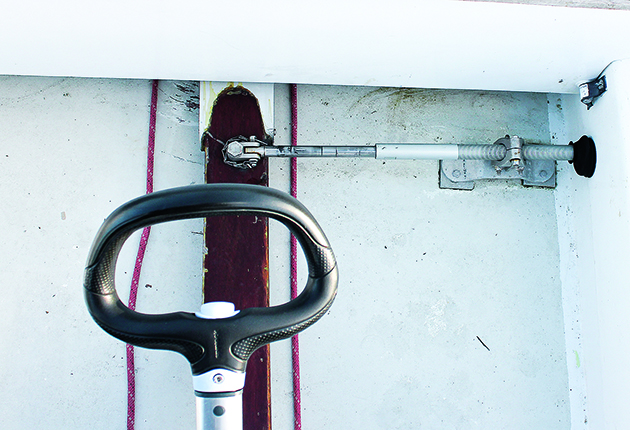
Only the end of the Bowden cable is exposed with a B&G SD10 drive. Credit: Rupert Holmes
As default these are set to 5 and 3 respectively on a scale of 1-9. The manual clearly explains how to do this via the keypad and small display on the unit.
Most of us struggle to commit these kind of procedures to memory, so it’s worth copying and laminating the relevant pages of the manual, along with a brief list of key points.
These can then be kept in the cockpit and used when tweaking the settings.
Boat autopilot reliability & redundancy
The better your boat autopilot the more likely you are to rely heavily on the system, which can cause problems when it stops working.
Pilot motors tend to have a very long life, though if you plan long-distance cruising it makes sense to carry a spare.
It’s also worth remembering that, if an NMEA2000-type database goes down, the pilot won’t have inputs from the compass and rudder angle sensor, and will stop working.
In the long-distance short-handed racing arena a lot of boats are fitted with two separate pilot systems.
If you’re fitting a new boat autopilot it makes sense to keep the old one as a back-up.

Have a variety of charging sources to power your boat autopilot. Credit: Alamy
Equally, if you already have a spare motor, it makes sense to fit it on the opposite side of the boat to the primary system, rather than stowing it in a locker.
The back-up boat autopilot can then be connected to a standalone system, without interfacing with wind data.
If the budget doesn’t stretch that far, an old- school system that can be bought on eBay for £2-300 may suffice for short-term use.
Equally, reliance on an electric pilot makes it important for boats venturing long distances to have more than one form of battery charging.
Fuel cells are used a lot in the racing community, with the engine then used only as a back-up.
However, this is a costly option and cruising yachts are more likely to opt for a large array of solar panels. Sailing with a decent boat autopilot is transformative.
Passage-making is easier and markedly less tiring, while unexpected situations are easier to handle if the boat can be left to steer itself without undue worry.
For many yachts, a small amount of time, plus some updated hardware, will make a big difference to performance.
Power Consumption
The amount of electrical power a pilot will consume varies hugely between different boats and in different conditions.
In light airs and a flat sea consumption will be very low – it may even be as little as half that of an MFD.
Keep a good eye on battery charge. Power usage will vary with conditions
However, off the wind in a lumpy sea state the unit will need to work much harder to maintain course, and average consumption may rise to 2-3 amps for most 35-38ft boats.
Newer systems that offer more accurate course-keeping need less power to run the motor, although their more sophisticated course computers may be more power hungry.
It’s also worth noting that turning up the settings to make an older system hyper responsive will use more power.
Keep your motor

An old motor can work with new boat autopilot computers
The pilot motor is not an intelligent output from the pilot computer.
Therefore if you already have a decent pilot motor, it may only be the sensors or pilot computer that need upgrading to create a system with better performance.